ระบบสำรวจภูมิประเทศ Mobile Mapping System : MMS และระบบแสดงผลข้อมูลแผนที่ 3 มิติแบบออนไลน์
14/11/2019
จากเหตุการณ์มหาอุทกภัยในปี พ.ศ. 2554 ทำให้พบว่าข้อมูลเชิงพื้นที่เพื่อใช้ในการวิเคราะห์และวางแผน มีความละเอียดและทันสมัยไม่เพียงพอต่อการบริหารจัดการภัยพิบัติ สถาบันสารสนเทศทรัพยากรน้ำ (องค์การมหาชน) หรือ สสน. จึงพัฒนาเทคโนโลยีสำรวจภูมิประเทศแบบเคลื่อนที่และผลิตแผนที่รายละเอียดสูง (MMS: Mobile Mapping System) เพื่อปรับปรุงข้อมูลภูมิประเทศให้มีความถูกต้องและทันสมัย เหมาะสมกับการใช้งานในทุกสถานการณ์
รถสำรวจระดับความสูงภูมิประเทศ (Mobile Mapping System : MMS)


เป็นเทคโนโลยีสำรวจเพื่อจัดทำแบบจำลองภูมิประเทศ 3 มิติเสมือนจริงและผลิตแผนที่รายละเอียดถูกต้องสูงในเวลาอันรวดเร็วรองรับภารกิจทั้งในภาวะปกติและภาวะวิกฤต ข้อมูลแบบจำลองยังสามารถตรวจวัดค่าพิกัดระยะทางความสูงและความจุได้อย่างถูกต้องแม่นยำ นำไปใช้วางแผนบริหารจัดการน้ำได้อย่างมีประสิทธิภาพ




ข้อมูลจากระบบ
- ภาพถ่าย 360 องศา สภาพพื้นที่เป็นภาพถ่ายความละเอียดสูงที่ได้จากกล้อง Ladybug
- Point cloud เป็นข้อมูลจุดสำรวจภูมิประเทศ 3 มิติ ในรูปแบบ las ไฟล์



ค่าความถูกต้องทำการ Calibrate โดย บริษัท วีเอสเค โกลเบิล จำกัด ได้ค่าความถูกต้องทางตำแหน่งดีที่สุดในระดับ ±3 เซนติเมตร
เรือสำรวจอัตโนมัติตรวจวัดแบบหลายความถี่ (Seafloor Echoboat Unmanned Surface Vessel : USV)


เรือสำรวจอัตโนมัติตรวจวัดแบบหลายความถี่ เพื่อสำรวจภูมิประเทศแบบเคลื่อนที่และผลิตแผนที่รายละเอียดสูงทางน้ำ (Seafloor Echoboat Unmanned Surface Vessel : USV)
สสน. ได้พัฒนาระบบสำรวจภูมิประเทศแบบเคลื่อนที่ประสิทธิภาพสูงเพื่อใช้เป็นข้อมูลในการวางแผนบริหารจัดการพื้นที่ได้อย่างถูกต้องเหมาะสม โดยพัฒนาระบบเรือสำรวจทางน้ำแบบอัตโนมัติ มีน้ำหนักเบา ขนาดกะทัดรัด สามารถเคลื่อนย้ายได้ง่าย และให้ผลสำรวจที่มีค่าความถูกต้องแม่นยำ

รวมถึงสามารถบูรณาการข้อมูลโดยนำเทคโนโลยีการแสดงผลแบบ 3 มิติ มาผนวกร่วมกับข้อมูลจากอากาศยานไร้คนขับได้ เพื่อสนับสนุนให้เกิดการนำเทคโนโลยีไปใช้ให้เกิดประโยชน์สูงสุดต่อการพัฒนาโครงสร้างพื้นฐานของประเทศได้เหมาะสมกับสภาพภูมิประเทศของประเทศไทย
ขั้นตอนการสำรวจ
1. เตรียมระบบ
- ตรวจสอบระบบไฟฟ้า
- เชื่อมต่อระบบการทำงาน
- ขนย้ายอุปกรณ์ ใช้เจ้าหน้าที่ 3-4 คน



2. สำรวจเก็บค่าระดับความลึก
ติดตั้งกล้องหน้าเรือ เพื่อติดตามและตรวจสอบพื้นที่สำรวจ โดยมีการแสดงผลข้อมูลสำรวจแบบ Real Time



3. เก็บข้อมูลค่าน้ำเบื้องต้น
- ระบบชักหย่อน มีมิเตอร์วัดระยะความลึก ตามความยาวของเชือก
- ระยะลึกสุด 30 เมตร
- ความคุมความเร็วในการหย่อนได้




4. ประมวลผล
ประมวลผลข้อมูลโดยใช้
• ข้อมูลสำรวจ
• ข้อมูลค่าน้ำเบื้องต้น
• Geoid model




ตัวอย่างการสำรวจ แม่น้ำเจ้าพระยา (ช่วงสถานีสูบน้ำดิบสำแล)


อากาศยานไร้คนขับ (Unmanned Aerial Vehicle : UAV)


ใช้ในการสำรวจระยะไกล เพื่อสนับสนุนภารกิจในการสำรวจพื้นที่ที่ยากต่อการเข้าถึงและมีพื้นที่เตรียมการจำกัด เพื่อสร้างข้อมูลแผนที่ภาพถ่ายและข้อมูลแผนที่สามมิติ


อากาศยานไร้คนขับขึ้นลงแนวดิ่ง รุ่น Nimbus VTOL V2
– ติดตั้งกล้อง Map-A7R Full-Frame Mapping Camera with 35mm Lens
– อุปกรณ์บันทึกข้อมูลดาวเทียม GNSS เพื่อการประมวลผลแบบ Post-Processing Kinematic (PPK) รุ่น AsteRx-m2 UAS-Accurate GPS-GNSS Receiver พร้อมเสารับสัญญาณ D-Helix HX-CHX600A Antenna
ข้อแตกต่างของการใช้งาน
อากาศยานไร้คนขับขึ้นลงแนวดิ่งทั้งสองแบบแตกต่างกันในเรื่องของความครอบคลุมพื้นที่การทำงานที่ Nimbus VTOL V2 จะสามารถทำงานในพื้นที่กว้างกว่าต่อการบินหนึ่งครั้ง


ความแม่นยำและความถูกต้อง
แผนการบินที่เหมาะสมแนะนำระดับความสูงบินที่ 400 เมตร ระยะทางบินไม่เกิน 20 กิโลเมตร หรือครอบคลุมพื้นที่ 1.5 ตารางกิโลเมตร โดยมี side lap 60%


ความคลาดเคลื่อนด้วยการประมวลผลวิธี Post-Processing Kinematic (PPK) โดยมีการวางจุดบังคับภาพ (GCPs) 5 จุดบริเวณมุมและกลางพื้นที่ และจุดตรวจสอบ (CPs) เพื่อตรวจสอบ 10 จุดกระจายทั่วทั้งพื้นที่โดยประมาณดังนี้
– X = ±15 cm – Y = ± 15 cm – Z = ± 30 cm
ขั้นตอนการดำเนินงาน

แผนที่ความละเอียดถูกต้องสูงและแบบจำลองภูมิประเทศ 3 มิติ



ภาพถ่ายทางอากาศพร้อมด้วยค่าพิกัดจากอากาศยานไร้คนขับถูกนำไปประมวลผลเพื่อสร้างแผนที่ภาพถ่ายหรือภาพ Orthophoto ซึ่งจะสามารถนำไปใช้ในการทำแผนที่ และยังมีข้อมูลสามมิติ หรือ point cloud และ ข้อมูลแบบจำลองความสูงเชิงเลข (Digital Surface Model : DSM) ที่สามารถนำไปประยุกต์ใช้ทำข้อมูลภูมิประเทศสามมิติ และสามารถนำไปประกอบกับข้อมูลจากอุปกรณ์ รถสำรวจ และเรือสำรวจ เพื่อพัฒนาต่อยอดในการใช้งานได้มากขึ้น
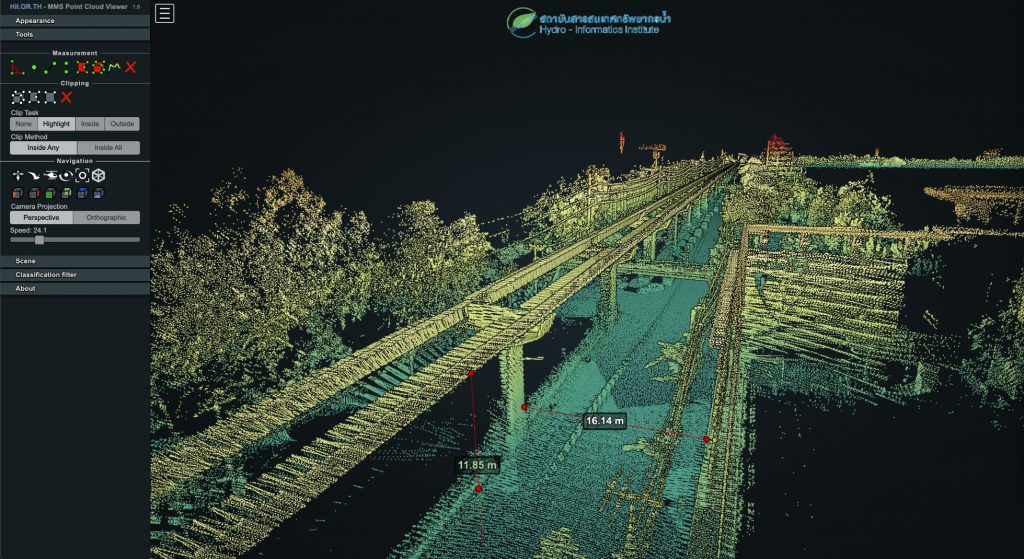
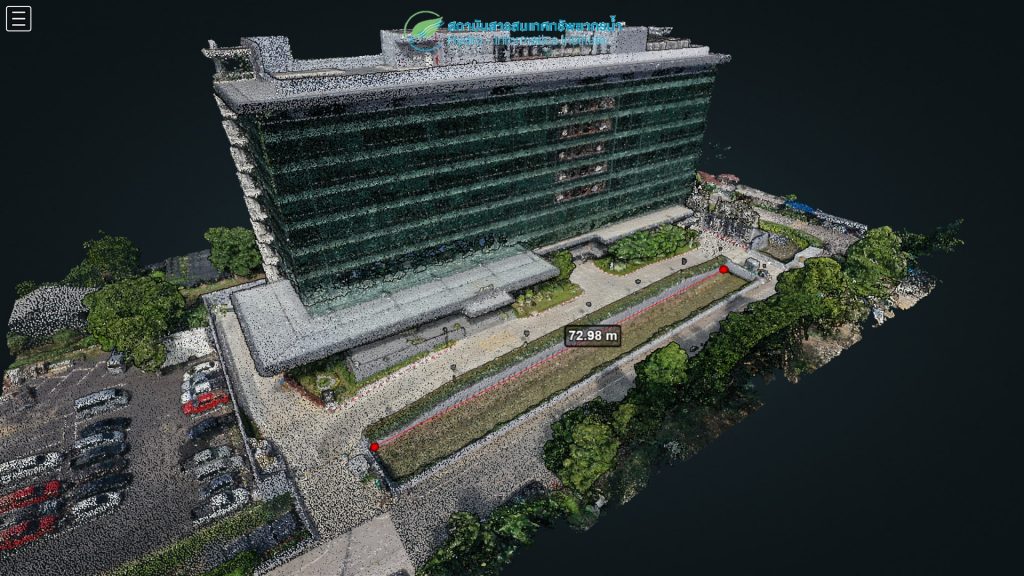
ระบบแสดงผลข้อมูลแผนที่ 3 มิติ

ระบบแสดงแผนที่ 3 มิติความละเอียดสูงในรูปแบบแผนที่พอยต์คลาวด์ (Point Cloud Map) ที่ สสน. พัฒนาขึ้น สามารถเข้าถึงแผนที่ 3 มิติได้ผ่านทางระบบอินเทอร์เน็ต https://portal-mms.hii.or.th/ โดยการใช้เว็บเบราว์เซอร์ที่รองรับการแสดงผลกราฟิก 3 มิติผ่าน เทคโนโลยี WebGL – เช่น Google Chrome, Firefox หรือ Microsoft Edge แผนที่ความละเอียดสูง

จากระบบนี้สามารถนําไปใช้ในการแสดงรูปแบบเรขาคณิตของพื้นที่ที่มีการสํารวจและเพื่อวัด ระยะทางระหว่างตำแหน่งบนแผนที่แต่ละจุด ผู้ใช้งานสามารถดูค่าพิกัด, ความสูง, วัดระยะระหว่าง 2 จุด, วัดพื้นที่, วัดมุม, วัดความกว้างของถนน วัดความสูงของวัตถุหรืออาคาร และสามารถสร้าง profile ของถนน และพื้นที่สํารวจได้ มีความถูกต้องทางตำแหน่งเฉลี่ยดีกว่า ± 7 เซนติเมตร ในทุกสภาพภูมิประเทศ